
AMRの停止位置はなぜ違う?2D・3D LiDARで見る自己位置精度の仕組み
- 2 日前
- 読了時間: 3分
AMR導入でよく聞く質問:停止位置精度とは
AMR導入を検討する際、多くの現場でよく聞くのが、「AMRの停止位置精度はどれくらいか」という質問です。ここでは自己位置精度について、2D LiDARと3D LiDARの比較を通じて分かりやすく紹介します。
2D LiDARの場合:平面上の三角測量
自己位置の計算は、「今のLiDARが見ている景色と持っている地図がどれくらい一致しているか」を確率的に計算していると紹介しました。
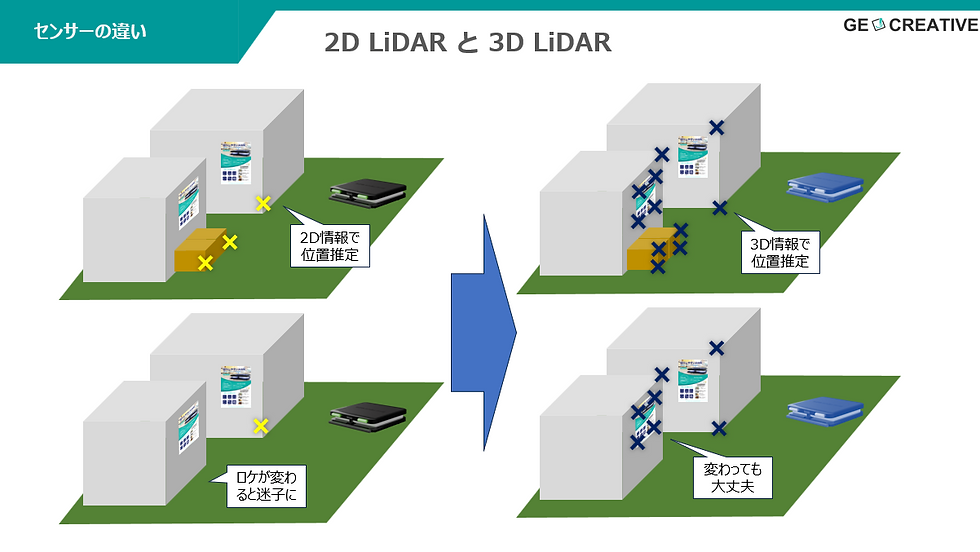
2D LiDARの場合は、平面上の限られた点(特徴点という)で「三角測量」をしている状態です。特徴点は、走行時の振動やセンサーの精度によって、作った地図にもLiDARで景色にも誤差が含まれます。この誤差が重なると完全に一致する「三角形」が存在しなくなります。従って緩やかに一致しているところを自己位置とする、という閾値の設定が必要になります。これが2D LiDARの場合に自己位置精度が落ちる理由になります。
極端な例として、3点のみで自己位置を計算している下の図のような場合ですと、特徴点となる障害物の位置が移動すると、正しく自己位置を計算できなくなります。
3D LiDARの場合:立体空間で多数の特徴点を使用
一方、3D LiDARは立体空間全体を使います。平面だけでなく立体的に多数の特徴点で照合を行いますので、縦、ななめ、横と立体的に多くの点で三点測量をしていることになります。そうすると一致率の低い「三角形」は計算に含めなくても良くなるので、特徴点となる障害物が移動しても自己位置には影響しなくなります。
なお参考に、同じ空間を2D LiDARと、3D LiDARで見たときの比較を共有します。特徴点のの量が大きく違うのが分かると思います。



※ 撮影日はそれぞれ違うので環境は一致していません。
尤度関数で見る自己位置精度の仕組み
尤度関数で説明すると、正しい位置だけが強く一致し、少しでもズレると一気に尤度が下がることにより、結果として尤度関数の山が鋭くなり、統計的に分散が小さくなるとで自己位置精度が上がります。
*尤度関数:統計学における逆問題の考え方で、順方向の「この場所にいたらこう見えるはず」ではなく、「こう見えているのだから、この場所にいる確率が高い」を逆算します。6σの考え方との類似性
これは品質管理の6σの考え方にも似ています。サンプル数が増えるほど、平均値の信頼性は高まり、ばらつきは小さくなります。自己位置推定でも同じで、特徴点が多いほどノイズが平均化され、 真の位置に収束しやすくなるためです。
カメラを使った自己位置計算の応用
なお参考に、当社はカメラを使った自己位置計算を実装しています。カメラにも各画素に相対する位置から赤外光を照射し距離を測定することができるものがあります。カメラでとらえた画像の特徴点と測定した距離を統合することで、3次元の空間地図を作ることができ、自己位置の計算は3D LiDARと同様に行うことが可能です。
まとめ:精度の本質は情報量
まとめると、本質は「情報量」であり、2Dと3Dの差は、センサーの次元そのものではありません。どれだけ多くの独立した観測情報を持てるか、観測情報が増えるほど自己位置精度は向上します。しかしその分コストが上昇するという問題があり、また確率で計算している限りは環境によっては自己位置精度が低くなる可能性は残っています。そこで別の機会では自己位置精度を上げるための運用上の工夫について紹介したいと思います。


